
一年以上ブランクが空いてるが、本当は今年の5月頃に作業した内容…なんだけど、加工方法のエントリだけアップして、実機のお話はツイしただけで忘れてたとゆーテイタラク(自爆)
さて、CNCによる追加工のページでも書いたとおり、チョイと市販のギアに追加工して軽量化とタップ穴作成をした。そのギアを実際にどう組み込んだのかが、今回のネタやね。順番に書いてみる。
まずギアベース板を作成し、車軸を固定する。


車軸は単純にベース板に取り付けると簡単にモゲるので、取り付け部分に更にもう一枚板を重ねて厚みを二倍とし、さらに奥側にも延長して固定する。上の左の写真が表側、右の写真が裏側やね。固定ネジは裏側から通して、表でツライチになる長さを選んでいる。タップ穴は表側に追加した変形ひし形の板やな。
シャフトに使ったのは、実は円柱型両雌ネジのステンレススペーサなので、奥側からコレもネジで固定する。これでもうガチガチ。副産物として、ベース板に対する直角度も向上する。これにモータとギア、サポート用のステー(3Dプリンタ製)を載せてみるとこんな感じやな。

モータは例の謎マクソン。バラすとモジュール0.5の10Tなピニオンがついてるので、それに合わせて全部設計してある。で、実際にオムニホイールを実装するとこうなる。結構ギリギリの設計やね。


お気づきだとは思うが、この設計では軸は回転しない。ホイール側にベアリングが入ってて、軸は固定でホイール側だけが回る。こうすると「軸のイモネジがぁぁぁ」という悲劇を防げる(笑)。ホイール側のギアはホイールと4本のネジで締結され、軸穴にはベアリングが入っている状態なので、そもそも「軸に締結するイモネジ」が存在しないのよな。
で、このまんまだとコートのゴミを噛みまくりなので、3Dプリンタでカバーを作るコトにする。ざっとこんな感じ。ホイール側はホイールに近接するので、特にガードなし。2本のネジで、カバーの内側からベース板へ向けてネジ止め。



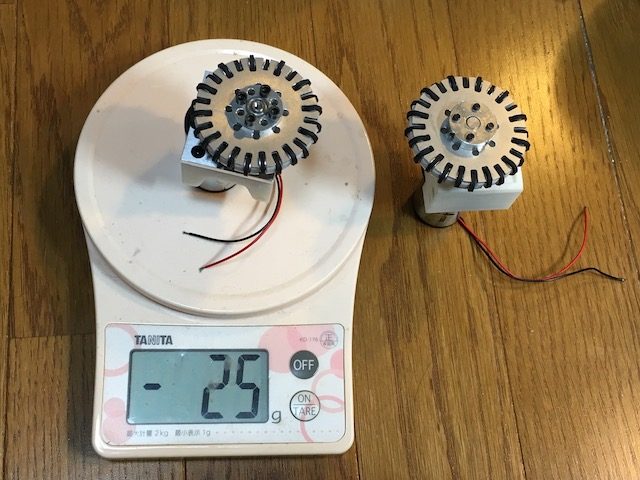
ちなみに、これで元のギアボ(タミヤのアレ)と比べて、25gの軽量化に成功してる。4個使うから100gの軽量化。スパーギアが樹脂なら、もう少しいくかな。
で、まず一機実機に組み込んでみる。この差はデカいね。


モーメント的にはあまりヨロシくないけど、モータが外側へ移動したのでキッカー関係の実装が楽になると共に、床センサ部へのマージンが増えたので、床センサの実装が楽になった。
あ、当然オムニの位置が同じになるように全体設計し、元の取り付け穴で取り付けられるようにステーも設計してあります。この辺は3D CADで設計するなら楽々ですね。
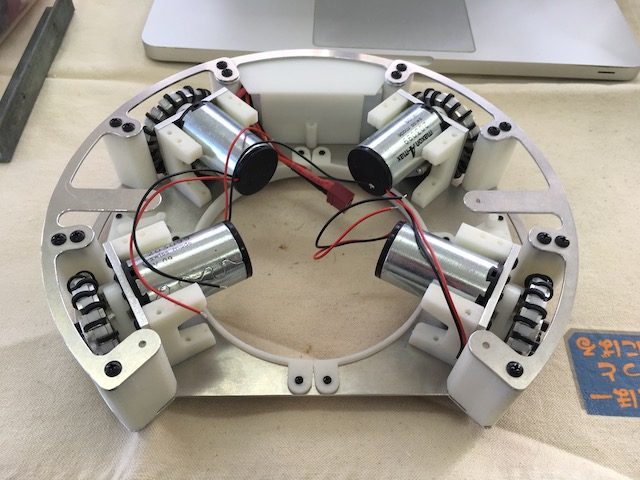
で、全部交換してこんな感じ。
さて、次はいつ更新できるのやら…(泣)