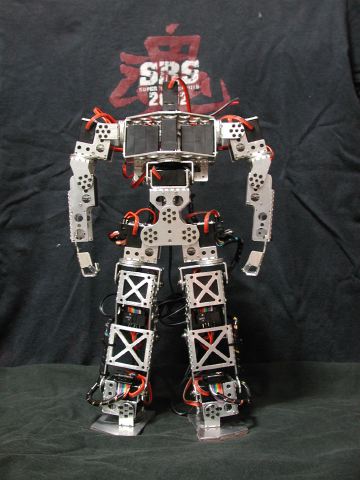
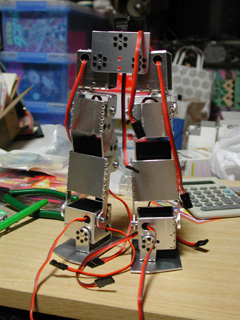
ROBO-ONE J-Class 4th 顛末updated 2005/Aug./07 ●2005年3月16日まぁ、すでに結果はあちこちにあると思いますが、見事な惨敗(^_^;)。完走すらできんという情けないテイタラク。 ま、反省点はやはりサーボ代をケチった所にあるんやろうなぁ....。次はあのサーボを使おう。そして、次こそは....Jクラス予選突破や(^_^;)。 ●2005年3月10日出かける直前に、非常に気になる記事があったので更新(^_^;) http://pcweb.mycom.co.jp/articles/2005/03/08/nsm/index.html ぐはぁ......やられちゃいました.....そうなんです、今回のこのワタシのロボットの目標の一つが、この歩き方をやることにあったんですよ。 ウチのロボットの写真を良く見てもらうとわかりますが、腰にロール軸を三角形に3軸並べてるのが、この歩き方のために必要な軸配置なんですわ。 ワタシはこれ、モンローウォークから気付いたんですよね.... ●2005年3月6日一応、ダイオード3個で良い感じになったので、ようやくロボット本体としてはレギュレーションに合致した形になった。 んが、壊れたと思ったサーボを分解して出てきたものは....頭がプラスで、ネジを切り損なったネジが、それも基板側から....異品 混入やん(T_T)。ウチで使ってないタイプだから、元からやな。除去したらちゃんと動くしぃ。モータの磁力でくっついてたから、振っても音がしないのよ ねん。 みなさまもご注意アレ。 ●2005年3月5日なんとか作業用の電源を確保。5V15Aのスイッチング電源がなんと250円(爆) リチウムポリマー電池も確保。1000mA/hが1セル450円(木亥火暴) #さぁ、デジットへ走れ! さて、減圧用のダイオードモジュール作って、バッテリ駆動の実験をするかぁ。 しかし、まさか重さで負けるとはなぁ。あっちの方がサーボ重いのに.... ●2005年2月26日そうそう、チャンとエントリーしましたデスよ。J018どす。ロボワンのページからのお客さんが急増? しかし、サーボのガタがここまで問題あるとはなぁ。なんせ、静止できないんだもん(T_T)。とりあえず、足首ピッチ軸と腰のロール軸にはフリクションを設ける予定。他の軸にも必要なんかなぁ....(T_T)。 ●2005年2月19日なぜかまたちょっとイジる時間がなくて、更新が遅れてまひた(^_^;)。でも、ようやく配線ができつつあります。
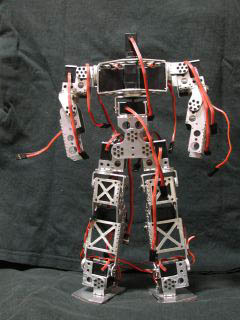
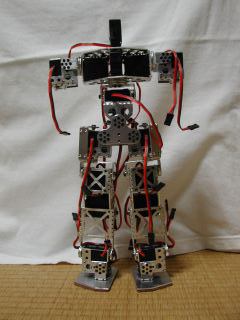
とりあえず、足回りは一旦これで完成ってコトにするつもりです。腕回りはホントはサーボの配線を直接基板にって考えていたのですが、やってみるとやっぱり足りない(T_T)。部品、買いに行かなきゃ...。 ●2005年1月15日一時的に忙しかったのですが、それも解消して夕べからイジってます。今の所、こんな感じになりました。
お気付きとは思いますが、いくつかの関節の構造を変更してます。以前の写真との対比でいえば、足のYAW軸がそうですね。腕のYAW軸にも同じ変更を行いました。 以前は片持ちにならざるを得ない場所において、強引に反対軸とのブラケットを設置し剛性を稼いでいたのですが、腰回りのYAW軸用に設 計したスラストベアリングが思いのほかシッカリできてしまったので、他のYAW軸や肩のPITCH軸にも適用してしまいました。いやぁ、スッキリスッキリ (^_^;)。 しかも、これで4箇所変更して5gほど軽量化できてしまいました(笑)。 さて、配線をどうしましょうかねぇ...。 ●2005年1月10日都合で削り部品が足りなくなり、片腕モゲた状態なので今回は写真はナシ。でも、腕はとりあえず完成にしました。 #スラストの厚み、計測ミスで0.5mm足りないから、予定が1.5mmのところ2mmの メカ全部乗せて重量を計測してみると、881g。ま、なんとかなりそうですね(^_^;)。 ●2005年1月8日なんとか時間が取れてきてるので、かなりあれこれ削り出してます。一応、下の写真のようなトコまで組み上がってきましたが、実は胸ブロック間違えたので、また作り直しです(T_T)。また、まだ腕の設計がシックリきてません。なんか納得できないんだよなぁ....
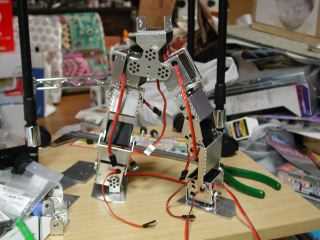
現時点での重量は815g。許容残り重量は385g。バッテリはNiMh使ったとしても5本で130gほど。制御基板が200gを超える事は考えにくいので、充分レギュレーションを充たせる感じです(^_^)。 ●2005年1月1日そういうワケで、工事中の看板を外し、正式に二足歩行ロボットの部屋としてオープンしました。目下の目標は、ROBO-ONE Jクラス参戦です。次の大会は3/13ってことで、焦って開発してます(^_^;)。間に合えばいいなぁ.... ●2004年12月31日使用前使用後(笑)って感じで、肉抜きしたパーツと差し換えてみる。コーナンで1000円ほどで販売してたキッチンスケールで計測してみると、左の使用前が245g、右の使用後が228gってことで、17gの軽量化。 |