ROBO-ONE J-Class 5th 顛末updated 2005/Aug./07 ●2005年8月6日なぜか昨日予選通過できてしまったので、今日は決勝戦に....。でも、昨晩勇んで攻撃モーション作ってたら、見事に腕の関節のサーボを2個焼いてしまう(T_T)。 しょうがないのでインシュロックで固定して無理矢理参戦したけど、攻撃モーションがうまく繰り出せず、そうこうするウチにバックドロップを決められてしまう(号泣)。 立てれば試合続行だったけど、技を決められた時に肩の配線が断線し、立ち上がれずにジエンド(爆泣)。 ま、前回は予選通過もできなかったのだから、一歩進めたってコトにしておこう.....はぁ..... ●2005年8月5日とうとう当日。ただいま午前2時の川崎のホテルの一室デス。とりあえず、ショボいデモ用データはできてるけど、バトル用がまだまだ。明日、会場で作ろう。どうも宿では動かせる場所がないんでどうにもこうにも.... まぁ、無線化はギリギリ暫定ながらなんとかなったのでヨシとするかな。 それではミナサマ、数時間後に会場で(^_^;)。 ●2005年8月1日動画アップできる環境にないのでアレですが、とりあえず歩く事はクリア。前後の起き上がりもなんとかクリア。あとは
ぐらいか。先は長いのぉ.... ●2005年7月28日いきなりですが、なんとか組み立てはほぼ終了(^_^;)。
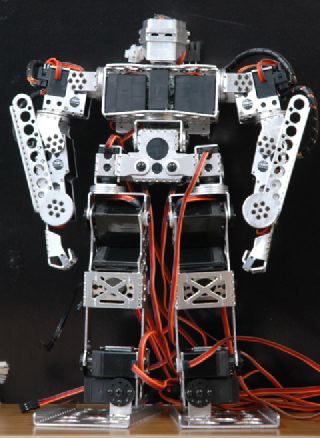
身長は以前より低くなって290mm程度。重量は少し重くなって1300g程度。軸数は1軸減って25軸。でもまだ軸数キング(笑)。 ●2005年7月23日とりあえず、エントリ番号はJ056に決定。でも、まだモノはなし(^_^;)。 サーボを入手して一部組立中なれど、バージョン違いで使えないものがある事が発覚して一大事。ヒジョーにやばいっす.... ●2005年7月18日当座の忙しい仕事がようやく終わり、しばらく余裕ができる。ので、今日は自宅でひたすらに展開図の設計。 どうにも時間が足りないので今回は下半身のみ新製し、上半身は前回のものをそのまま流用することに(^_^;)。腰のYAW軸のところで互換パーツを作成すればイケることを確認。 さて、サーボを買わねば..... ●2005年7月16日あ~あ、まだ設計すらちゃんと終わってないのに、Jクラスにエントリしちまった(^_^;)。 間に合うんだろうか....いや、間に合わせるのだ(笑) ●2005年4月10日なんか、急に作業が止まってしまいました。いや、時間がないというわけではなく、なんとなく今やってる設計がシックリこないのです。 こういう時は、なにか根本的な所でマヌケな事をしている可能性が大なので、それがなんなのか早く見極めたいと思います。 それにしても....はやくJクラスの次のレギュレーション決まらないかなぁ.... ●2005年3月27日忙中閑ありとは良くいったもので、本業がメッチャ忙しくなってきましたが、その割にはちゃんと二作目の設計が進んでいたりします(^_^;)。 基本的な軸構成は前回と同じですが、今回はあの小さくて力のあるオニューのサーボを使うべく、板金の設計をやってまふ。 今回のテーマは、前回の「ヴィジュアル系」に加え、「サーボモータは耳落としまで」でいきます。前回作ではサーボモータの表も裏もネジだらけになってたんですが、アレは実に整備性が悪く、ドタンバでサーボ焼けたら一巻の終わりという問題がありました(爆)。 今回は、サーボの耳落としはするものの、サーボ自身のネジすら共締にしない方針で設計しとります。ネジの重さが減る分、板金の重さが増えるかと思いますが、はたしてどっちが軽くできることやら....。 まぁ、今回のサーボは30グラムもあるんで、それだけでちょっと問題ではあるんですけどね.... Copyright 2005 All Rights Reserved by Kazutaka 'Zak' Sawa . |