|
2004/Mar./07
|
|
●2004/03/07 汎用IOポートを使ってソフトでI2Cデバイスにアクセスするコードを書き上げた。とりあえずEEPROMへのアクセスはちゃんとできてるようである。今はまだEEPROM用としてしかソースコードを整理できていないが、いずれリアルタイムクロックにも対応させるために汎用化する必要があるな。 |
|
●2004/02/23 というわけで、緊急に新しいオペアンプを購入して実験してみた。モノは「LMC660CN」ってやつで、共立電子やデジットに置いてあったもの。2902のピン互換なので、そのままソケット抜き差しでOK。この辺、森永さんが先を見越してソケット化の指示があったのが幸いしている。 で結果だが、予想通りギリギリまでクリップせずに動作するようになった。壁板を際まで持っていくと、それまで最大値260程度だったのが370ぐらいまで上がる。 しかし、問題も残されている。現状の光軸合わせでは、最後の1cm以下になるとLEDのスポットのサイズが小さくなりすぎて受光軸を外れてしまい、逆にレベルが落ちてしまう。これをどうするかが課題である。 |
|
なんとかセンサー作動チェックソフトを仕上げ、実際に動作させてみる。CPU側の配線に大バグがあったものの、あとは結構順調に動作した。 ただ、どうもオペアンプの特性が悪く、思った程接近時の解像度が取れていない。オペアンプのトコでクリップしているので、オペアンプ自体をレールtoレール出力可能なものに取り替えてみる予定。 それにしても動作の再現性がよい。森永さんの回路設計やパラメータ設計がすばらしいのだろう。 |
|
CPU側の配線も完了し、組み上げてみた。ようやくマイクロマウスらしい形になった。 まだあとA/Dのリファレンス電圧を印加してない。なので、その周辺の回路を引き回せば、ミスを除いてハードウエアは一応完成。パラメータ用のEEPROMとRTCはおいおい。 あとはソフトの勝負。お楽しみはこれからだ.....。 |
|
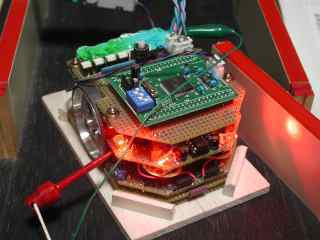
というワケで、組み上がったばかりのセンサーボードを公開。回路は完璧に森永さんトコのBASICMouseのまんま(^_^;)。 基板の形状的にこちらの方が苦しいので、全ての受動部品は立てて実装。まるで往年のトランジスタラジオのような状態になっている。 部品配置も森永さんの指示のまま。あの配置は実によくできているので、実装する人は必ずチェックしたほうが良いと思う。ほとんどの部品間の配線は電線不要で行えるハズ。 配線はさすがにアナログ回路部分に関してはビニール皮膜の電線を使用したが、本当は基板化すべきなのであろう。 まだ通電してのチェックはLEDが点灯するかどうかしか行えていない。あとはCPUボード側の配線を完了させ、実際にソフトで動作させてみないことには、正しいかどうかも不明。 続きは明日以降頑張る予定。 |
|
これからセンサーボードの実装にかかる予定だけど、そのまえにちょっとしたtipsを。 サンケンのドライバICってちょっと変わったピン構造になってるので、専用基板でも起こさない限りリードの取り回しに苦労する事になる。 で、それを短く切って全部配線するのもいいのだけど、ワタシはこんな風に曲げ直して使っている。実は、ピン3本目が蛇の目基板の穴2つ目に相当する間隔になっているので、残りの2本を2列目に配置し、3本が直角二等辺三角形のような配置になるように曲げていくわけだ。そうすると、普通の蛇の目基板にそのまま実装できるようになる。 写真ではモーターへの配線を上から取っているのでちょっと見にくいけど(^_^;)。 |
|
充放電器完成。大会の時に持ち運びやすいように、取っ手付きのクリアケースに全て収納できるようにした。 秋月キットは特に加工はしていない。木の板の上に固定してあり、そのまま取り出して使えるようになっている。 箱の四隅に脚代わりのボルトを接着してある。コレで浮いた空間に電源用のアダプタを収納する。 あとはステッカーチューンやな(爆)。 |
|
●2004/02/06 先日ROBO-ONE見たついでに買ってきた秋月充電器/放電器を組み立てる。ACアダプタの格納スペースも込みで、6本パック2個が同時充電/放電できるものを、持ち運びしやすいケースにおさめることにする。 |
|
●2004/02/03 昔のフレッシュマン決勝で発覚したバグを修正。でも、まだ戦略練り直しには着手できてないんだよな。 |
|
●2004/01/25 迷路探索アルゴリズムの検証のため、シミュレータを仕上げる。概ね動作するようになった。 しかし、昔のフレッシュマン決勝でハデなバグが発覚。ヤバい(^_^;)。 |
|
バッテリーパックを作成する。以前はビニールテープのグルグル巻きだったが、今はなんともスマートな方法でできて、しかもコンパクト。 作り方はココにメモしたけど、真似する場合はくれぐれも自己責任でお願いします。ホントにヤバいので....。 |
|
モーター加速ルーチンの検討を行う。左右独立完全割込更新での加減速ルーチン作成。一応、無負荷で3500ppsまで回転できる事を確認。 あと、そろそろ必要と思いケースを作成。みんなが使っている100均の桐箱に、同じく100均のニスを重ね塗りして艶を出す。 (後日金具を付けた姿がコレ→) |
|
CPU系の5Vを生成する回路を追加。バッテリーからの電力供給に対応。モータードライバー周辺回路接続完了。サンプルコードによるモーター回転確認完了。とうとう動き出した(^_^)。 あと、センサーボードのベース基板作成。だいぶんマウスらしくなってきた。 |
|
モータードライブ基板の配線完了。でも、基板内配線だけでCPUや電源にはまだつながってない。次はバッテリーまわりや5V系も作成せねば.....。 そうそう、結局手に入らないので今回のではSLA7033Mを使っている。ギブミーSLA7052M~。いや、ちゃんと買うから誰か1000円/1個ぐらいで5個程度売ってくれ。 |
|
実は数日前にできていたのだが、CPU基板の取り付けとスイッチ類の取り付け。まだ外部配線はゼロ。 なお、本日gccベースでの3069用モニタが動作を開始した。もちろんMac上で作成しているのは言う間でもなし。 |
|
上下の基板の隅カットと、車輪の穴開け。エフテックの車輪は厚みが2mm弱ぐらいあるので、穴開けすることでの軽量化の効果はかなりある。ちなみにレシピは、半径12.5mmのライン上に直径10mmの穴を6つ。先に方眼紙に書いておいて、中心点だけポンチで写すのがコツ。 |
|
もちろん写真の右が前。初心に帰るっつー割には、なんか冒険しようとしてねーか?>をれ(^_^;) |
 ●2004/02/22
●2004/02/22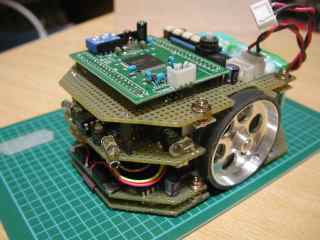 ●2004/02/19
●2004/02/19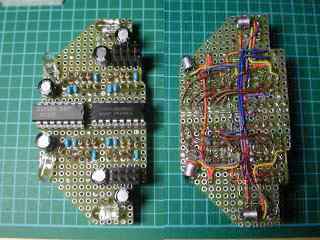 ●2004/02/16
●2004/02/16 ●2004/02/13
●2004/02/13 ●2004/02/07
●2004/02/07 ●2004/01/18
●2004/01/18 ●2004/01/10
●2004/01/10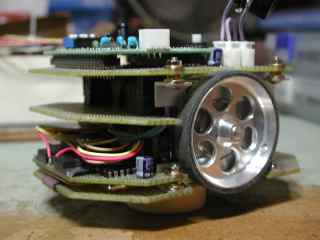 ●2004/01/04
●2004/01/04 ●2003/12/30
●2003/12/30 ●2003/12/28
●2003/12/28 ●2003/12/21
●2003/12/21 ●2003/12/06
●2003/12/06●初心マウス(仮称)仕様
- モーター:シナノケンシのSST39D1010
- CPU:H8/3069秋月ボード
- バッテリ:単四NiMhの800mAhを12本で昇圧なし
- ホイール:エフテックのマウス用を加工
- トレッド:スポンジ両面テープの上に特殊シート
- モータードライバ:SLA7033M(SLA7052Mが手に入るとイイなぁ)
- 車体:モーター保持金具のみアルミ材で、あとは秋月蛇の目基板
- ネジ:モーター固定用以外はM2.6に統一
Copyright 2003 - 2004 All Rights Reserved by Kazutaka 'Zak' Sawa .