
なんか、妙な記事が上がってたので、とりあえず書く。この辺は一応専門ではあるし、変な使い方されて無闇に壊されていくのもイヤなので…。
●世間一般、普通のRCサーボの動作と信号
若干メーカー間で違いがあるが、基本的にデファクトスタンダードになってるRCサーボってのは、仕様としては上から見て左右最大60度にサーボホーン(レバー)がスイングするようにできている。これは、多くの場合そのホーンの先にロッドを取り付け、それでステアリングなり動翼なりを動かすためで、これ以上スイングするとロッドがサーボホーンに干渉してしまうのだ。それを避けるために、左右最大60度までで使うコトになっている。実際にはマージンを考え、左右40度ぐらいまでの範囲で使っているコトも多い。だから、仕様表記における速度も、60度動かした時に何秒かかるかという数値で表現されている。
その際、入力される信号は(メーカーによって若干の数値の違いはあるものの)パルス状で、標準で約20〜22mSec毎に以下のようなパルスを入力することになっている。いわゆるJR Propo標準やね。ただし、場合によっては、左右が逆になっているケースもある。
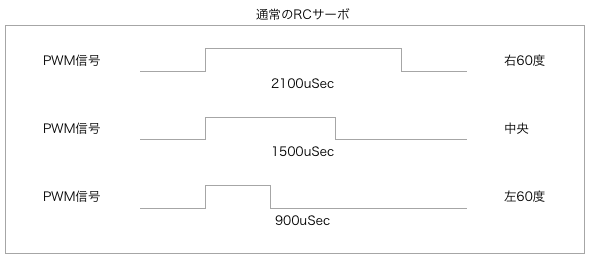
これが大原則であり、一部の例外的なものを除けば、通常これから外れた使い方は仕様外となる。仕様から外れたパルスを入力した際の動作は未定であり、場合によってはケース内部でストッパが接触して破壊する可能性さえあるので、何らかの明記がなされていない限りは、この範囲で使用するコトをオススメする。
●動作と信号の例外的なケース、その1
一部のRCサーボには、本来のパルス幅の範囲を超えても対応できるコトを表記したものがある。この場合、信号に対する動作範囲は以下のようになる。これも、場合によっては左右が逆になっているケースもある。
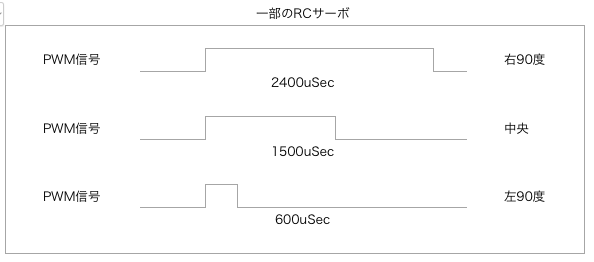
このように、デファクト規格の外側まで対応し、その結果180度の範囲で動作できるようにしたものである。ロボット用として販売されてるものの一部がこのようになっている。
一方、特にアナログサーボに多いのだが、仕様外ではあるものの、同様の信号を入力することで180度動作してしまうものも実際には存在する。ただし、それはあくまで仕様外であり、動くか動かないかは不定である。また、場合によってはリニアに動作しなかったり、ストッパを破損する場合もある。
●動作と信号の例外的なケース。その2
これも主にロボット用として販売されているものであるが、逆の発想になっており、本来120度動作する信号が入力された時に、実際には180度動作するように設計されている。この場合、信号に対する動作はこのようになる。これも、場合によっては左右が逆になっているケースもある。
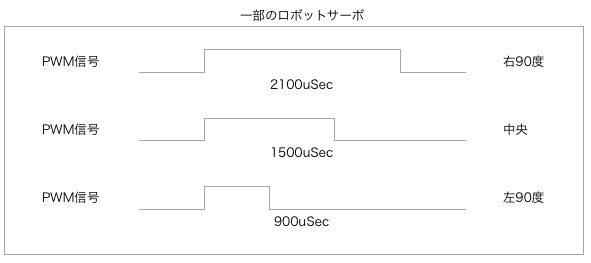
この場合、従来の120度の信号のままで180度の動作をするので、信号の生成方法を変更する必要がないというメリットがあるが、代わりに解像度的にアラが出易いというデメリットもある。
また、一部の引き込み脚(RC飛行機なんかで、脚を収納する奴)専用のRCサーボとして販売されているものも、このように動作しているコトが多い。
●動作と信号の例外的なケース、その3
他にも、実は動作角が270度だったり300度だったりするRCサーボも世の中には存在する。この辺りは概ねロボット用と考えてよい。
また、信号的にニュートラルが1500uSecではないものも存在する。一部の競技用に、パルスの更新レートを向上したくて、全体の幅を狭めているものだ。半分だったり、更に狭かったりする。
軸が回転するのではなく、伸びたり縮んだりするタイプのRCサーボも存在する。サーボホーンの先端にロッドをつけて動かすのではなく、そのロッドそのものを押し引きできる構造になっている。
また、多回転型のRCサーボというものもあって、10回転ぐらいするようになっている。これは、RCヨット等のセールのワイヤーを巻くためのものである。
さらには、そもそも飛行機の脚の形状をしたもの(往復するだけなので、サーボと言えるかどうかは微妙)もあって、結構興味深い。
●RCサーボの制御方法に起因する違い
概ね、世の中のRCサーボは、以下の3つに分類できると思う。
- アナログサーボ
- デジタルサーボ(専用IC方式)
- デジタルサーボ(マイコン方式)
これらの違いであるが…
・アナログサーボ
RCの黎明期からずっと存在する制御方式である。基本的にはパルス幅を電気的(アナログ的)に角度信号に変換(実際には積分して電圧にしてる)し、ポテンショから得られる角度信号(実際には出てくる電圧)との差分を取り、その正逆や電圧に応じてモータに電流を流す。論理回路は一切使用していない。アナログ電子回路のみでモーターを駆動してサーボホーンを動かすようになっている。
大半はP制御のみ、ごく一部に例外的にD制御が入っているものもあるが掛かりは弱めなため、Pゲインが上げられずレスポンスは悪い。またそのため、外乱に弱く角度を保持できないコトが多い。その代わり、ハンチングするような状況には陥りにくい。無論、無理をさせ続ければモーターが壊れるか回路基板が燃えるなどのトラブルが発生する。なお、最近では一部にはアナログサーボのエミュレーションをマイコンにさせているっぽいものも存在するようである。
ちなみに、アナログサーボ限定の裏技として、パルスを連打するとトルクが増えるというのがある。本来約20mSec毎に一発のパルスを、もっと短い間隔で入力するのだ。実はアナログサーボでは、信号のパルス一発でモータに一発パワーを加えるという方式になっているので、単位時間当たりのパルス数を増やせば、それだけモータにパワーが行くというワケだ。なお、当然のコトながらモータや回路が焼けやすくなるし、ハンチングも発生しやすくなるので、注意が必要である。
当然だが、この裏技は後の方式のRCサーボには全く無意味なので、アナログサーボでもないのにそんなコト言ってる人がいたら無視してよい。また、だからこそ入力のパルスが無くなると脱力する。
・デジタルサーボ(専用IC方式)
初期のデジタルサーボには、デジアナ混在の専用ICが使われた。アナログサーボの保持力不足問題を解決すべく、概ねガッツリPD制御が掛かっている。強めのD制御による補正のおかげでPゲインを上げるコトが可能になり、外乱に対しての保持力がアップするという図式である。その代わり、負荷の重量が大き過ぎたりした場合、限度を超えると簡単にハンチングしてしまうという欠点も持っている。一旦ハンチングすると恐ろしい勢いでモーターが正逆転されてしまうため、劣化が早まる上に最悪の場合は回路基板まで燃えるコトになる。
概ねある会社が作った専用ICが用いられており、その会社が廃盤にしたあとは、サードパーティが継続して製造している。大半のデジタルサーボが同じICを用いており、内部的な制御周期は約3mSecで固定されているので、パルスが入ってくる間隔は関係ない。一応、アナログサーボを模してパルスがなくなると脱力するように設計されている。
なお、デジタルという名前になってはいるが、実はD制御はアナログ的に行われているコトを知る人は少ないかもしれない。原理を解説するのは面倒なので端折るが、これはなかなか合理的な方法で、D制御の掛かりに関してはマイコン方式よりも上かもしれない。
・デジタルサーボ(マイコン方式)
現在のデジタルサーボは、マイコン方式になっているものが増えてきている。これは、PID制御が可能になると共に、信号としてパルスだけではなくシリアル信号も受信可能になるというメリットがある。また、シリアル信号による内部設定で特性を色々に変化させるコトもでき、アナログサーボ風に動作させたり、動作角を120度から180度に変更できたりするものもある。
しかしながら、突き詰めた動作をさせた場合は、専用チップ方式と同じく簡単にハンチングしてしまうコトもある。もちろん、ハンチングさせたり無理をさせ続ければ、こちらも壊れてしまうコトになる。なお、メーカーによっては電流に制限を掛けたり、内部温度をチェックして状況を把握し、安全のためパワーダウンするような仕様になっているものもある。
一部のマイコン方式RCサーボについては、パルスの入力を停止しても脱力しない。これは、マイコン方式においてはむしろ入力が無くなって停止させるコトの方が追加的な機能になるため、実装していないケースがあるからだろう。
こんな感じなので、用途によっては今でもアナログサーボが使い易い場合もあったりする。したがって、アナログサーボが古いワケでも悪いワケでもない。しかし、特性の違いは結構大きいので、そこを踏まえた使い方をしないと、うまく動作してくれなかったり、最悪の場合は壊れてしまったりもする。
●RCサーボの使用モーターに起因する違い
現状、RCサーボに使われている主なモーターは以下の三つだと思う。
- コアードブラシDCモーター
- コアレスブラシDCモーター
- コアレスブラシレスDCモーター
これらを順に解説してみる。
・コアードブラシDCモーター
一般にはマブチモーターに代表されるような昔ながらのDCモーターで、回転子に鉄のコアがあり、それに銅線を巻いてコイルにしてあるタイプのもの。メリットとしては安い点が筆頭に来る。また、実は熱にも強いコトが多い。これは界磁用の磁石にフェライト磁石を使っているコトが多いためで、後述の希土類磁石に比べて耐熱性が高いようだ。
一方、コアが存在するため界磁用磁石に引っ張られてしまい、回転開始するまでに投入しなければならないエネルギーが大きめなので、動作としてはどうしてもギクシャクしてしまう。比較的安価なRCサーボに使われている。
・コアレスブラシDCモーター
前述のコアードとは異なり回転子にコアがない。コイル自体が整形されて回転子になっている。そのため、メリットとして回転開始するまでのエネルギーが少なくてすみ、細やかな動作が可能になる。一般にはマクソンが有名だが、国内でもアダマンド並木精密宝石とかタキロンシーアイ(旧シーアイ化成)といった会社があり、RCサーボにはこちらの国内メーカーのものが使われているコトが多い。いわゆる高級RCサーボは、多くがこのタイプのモーターを使っているようだ。
しかし、デメリットとしてより強力な磁石を用いる必要があり、希土類磁石を使うコトが多いため、耐熱性に関してはフェライトに劣るようだ。また、回転子のコイル整形工程もかなり難しいらしく、全体的に高価になってしまう問題もある。もっとも、コアがない分小さく作れるというメリットもあるので、ケータイ等のバイブレータ用に大量に生産された結果価格が下がり、超小型RCサーボにも使われるようになってきたという例もある。
・コアレスブラシレスDCモーター
一般には単にブラシレスと表記される事が多い。また、本質的な意味でこのモータをDCモーターの分類にしてイイのかどうかには一定の議論がある。
RCサーボに使われているものは基本的にはインナーローターのコアレスブラシレスなので、そこを省略して表記している。これは回転子が磁石になっていて、コイルが周囲を囲っているという逆転構造になっている。メリットとしては、ブラシが存在しないコトによる耐久性向上と、同体積あたりのパワーが数割アップするコト。なぜなら、ブラシが占めていたエリアもパワーを生み出せるので。また、コアレスなので上記のコアレスブラシDCモーターと同じく滑らかに回るというメリットもある。高級RCサーボに使われるコトが大半であるが、一部廉価版もあるようだ。
デメリットとしては、専用の駆動回路を設置しないと回転すらしないモーターなので、制御回路基板が大規模になってコストアップするという問題がある。また、RCサーボに入る程度の大きさのモーターだと極数もスロット数も少ないため、実は回転の滑らかさが今ひとつコアレスブラシDCモーターに及ばないという感じがある。また、こちらも同じく希土類磁石を用いているので、耐熱性に関してはあまり高くない。
●RCサーボの角度センサに起因する違い
軸の回転角度を制御している以上、どの制御方法でもなんらかの方法で角度を確認しているワケだが、そのセンサはたぶん今のところこれぐらいだろう。
- ポテンショ
- MRセンサ(単品)
- MRセンサ(複合IC)
これも順に解説してみる。
・ポテンショ
平たく言うならボリュームのコト。サーボホーンの軸の下に仕込んであって、回転角度によって変化する抵抗値を使って角度を検知している。メリットは思いっきり安いことが筆頭だが、回路構成もシンプルになるという点も見逃せない。デメリットは寿命がどうしても比較的短い点だけど、最近のものはかなり長寿命になってきている。
なお、業界用語としてこれを「ポテンション」と言う風習があるが、これはスロットのコトをスロットルと言うようなもので、明らかに間違って広まっていると思う。自分的には気持ち悪くて仕方がないので、ここではポテンショとする。
・MRセンサ(単品)
単純に言えば磁力の強さを検知するセンサのこと。軸の下に小さな磁石を仕込んでおき、それをセンサの上で回転させるコトで磁力を変化させ、それを検知することで角度を割り出している。メリットは非接触なため寿命が長いコトだが、いくつかのデメリットが存在する。
まず、回転角度がリニアに検知できないため、必ず補正を行う必要がある。そのため、必ず工場キャリブレーションを行わねばならない。検知できる角度としても、120度かもうチョイぐらいが限度で、それ以上の角度を検知しようとすると補正も大変なコトになり、あまり芳しくない。
・MRセンサ(複合IC)
この場合、IC内部で補正は済まされてるので、使用にあたってはキャリブレーションはまず必要ない。また、検出可能な角度も大半が360度全てなので、ポテンショでは実装しづらい角度でも簡単に実装できる。
しかしながら、実は残念ながら解像度的に今ひとつであったり、内部での補正演算の影響で反応速度的に遅かったりして、あまり高速な仕様のRCサーボでは使えない感じがする。また、当然ながら複合ICは高価である。
とりあえず、思いつくままにざっと書いてみた。願わくば、上手にRCサーボを使って楽しい工作をされるコトを祈念する。