
なんか、RCJサッカーのオープンクラスでは、今度からオレンジボールのみで競技をやるってコトで、一気にレベルが上がってるみたいなんだけど、毎度のコトながらというかなんというか(笑)、見事にソコに切り込んだのがオサルくん(@yxtada)。
http://yunit.techblog.jp/archives/70016697.html
先日の中津川で、速攻全方位センサーのデモなんかやるもんだから、試合には負けたハズなのに囲まれるという妙な状況になってた(笑)。んで、ヲイラもちょっと興味を持ったので、彼のやり方を参考にちょっと自分なりに作ってみた。
作図方法は基本的に彼と同じなので割愛。3Dプリンタでプリントして、こんなのが出来上がった。ま、この辺は同じようなモンやな。
んで、これをどうやってあの反射鏡につなげるのかだが、彼が取った手法はヒートプレスだったので、それとは違う方法を試してみた。
まずはパテ盛って磨く。まぁ、この辺はホボ同じかな。成形跡のスジにシッカリと入り込ませないと磨いたらボロボロ落ちたりするので、指先をパテだらけにしてでも擦り込む。ここで使ってるのは、普通のタミヤパテ。
んで、乾いたらサンドペーパーである程度塗りムラを落とし、さらに軸を取り付けてボール盤で回転させ、金属製のヘラのエッジを押し当てて削る。ココでサンドペーパーを使わない理由は、目が細かすぎてスジの中のパテを掻き出してしまうから。

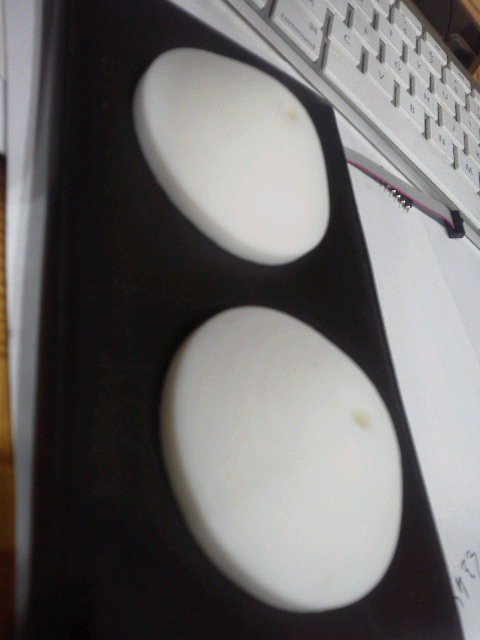
上側のは、パテ盛って乾かした状態。下側のは、ボール盤で削ったあと、見ればわかるけど、この段階でももう既にある程度の光沢が出るぐらいでないとマズい。もっとも、実はどうも少し削りすぎた感もあったりもする(^_^;)。
で、ヲイラはココに、極薄のフィルムを貼って鏡にしようと考えた。貼るのはコレ。
http://www.hasegawa-model.co.jp/product/tf1/
極薄のフィルム素材で、曲面にも貼り込むコトが可能という優れもの。これをテンション掛けながら貼ってみた。

かなりテンションを掛けないとこんな感じにはならないが、特に破れるコトもなく、無事ミラーになった…とはいえ、細かいシワが結構残ってしまったのではあるが…。あと、やはり研磨がイマイチで、スジは残ってるわ若干デコボコはあるわ…(^_^;)。
一応粘着性のあるシートだけど、やはり剥がれやすそうな感じではある。なので、アクリルパイプにシートごとハメこんでしまおうと考えている。とりあえず今のところ、この向きに置いておけば剥がれて行く感じはしないのではあるが…。
ヲイラはこのままコレを組み立てて実験してみようと思っている。まぁ、何かの参考になればイイかな。
あと、ちょっと値段が凄いらしいのと、やはり研磨が重要なので手が出ないんだが、こんな塗料があるらしい。
http://www.protoolshop.net/paint/hypermetal/17690.htm
こちらも、参考までに…
(この項は、試作が進んだらまた更新します。)